Uno de los eternos desafíos para mejorar la atención a los pacientes con prótesis consiste en derribar las dificultades que, en ocasiones, se presentan a la hora de saber, de la forma más rigurosa posible, cómo es el uso del calcetín protésico en el día a día.
Esta información se limita a lo que explica el paciente y aunque éste sea la mejor fuente para ello, no es suficiente. A la modernización de las prótesis que avanza a pasos agigantados le sigue, en paralelo, las nuevas tecnologías que permiten mejorar el conocimiento de lo que ocurre al salir de la clínica.
Un ejemplo de ello, es el prototipo desarrollado por un equipo de investigadores de la Universidad de Washington que propone un dispositivo basado en la tecnología de identificación por radiofrecuencia para captar información continúa durante el uso del calcetín protésico.
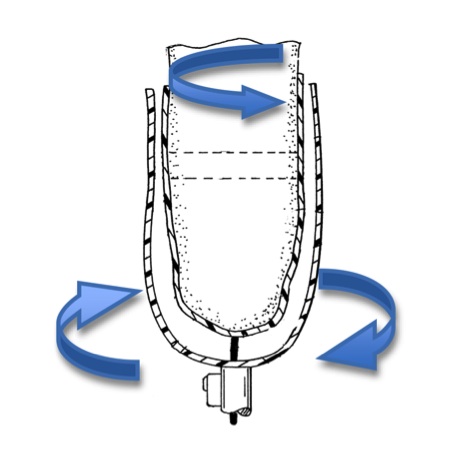
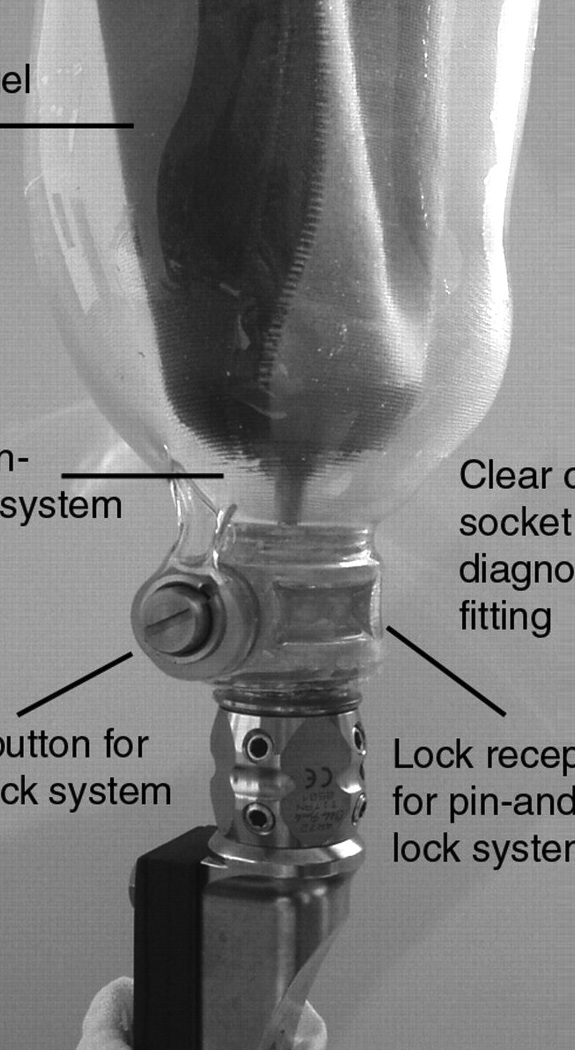
El sistema está formado por las llamadas etiquetas RFID que se adhieren a los calcetines protésicos utilizados por personas con pérdida de la extremidad tibial, junto con un lector de alta frecuencia colocado en el exterior del encaje protésico.
Las pruebas en el laboratorio realizadas a tres participantes mostraron un funcionamiento correcto durante el sentado, de pie y al caminar, cuando se lleva uno o dos calcetines.
Si bien los esfuerzos descritos en el informe demuestran que un monitor de calcetín basado en la tecnología RFID es posible, también fueron identificados algunos problemas: el modelo inicial perdía fiabilidad al incrementar el número de calcetines y la detección exacta era sensible a la orientación de la etiqueta en relación con el lector, la presencia de fibra de carbono en el encaje protésico y la superposición entre las etiquetas.
Además, el diseño descrito en el informe opera durante diez horas, por lo que necesitaría una fuente de energía de mayor duración para ser incorporada, con el objetivo de realizar un control más prolongado.
Tras los primeros exámenes, los expertos concluyeron que el dispositivo creado puede ser más eficaz y existe la posibilidad de obtener un sistema capaz de alertar a un paciente cuando un calcetín prótesis necesite ser añadido o retirado.